Rise of the RISC Processor
Since the introduction of the microprocessor in the mid 1970s, there seemed to have been an almost unbroken trend towards more and more complex – you might even say Baroque – computer architectures. Some of these architectures have developed rather like a snowball by adding layer on layer to a central core as it rolls downhill. A reaction against this trend toward ever increasing complexity began at IBM with the experimental 801 architecture and continued at Berkeley. Patterson and Ditzel at Berkeley were first to coin the term RISC, or reduced instruction set computer, to describe a new class of streamlined computer architectures that reversed previous trends in microcomputer design. Since then, all the major microprocessor manufacturers have launched their own processors based on the principles established at IBM and Berkeley. All processors now incorporate some elements of the RISC philosophy and the pure RISC machine is no longer fashionable.
Origin of RISC
According to popular wisdom RISC architectures are streamlined versions of traditional complex instruction set computers (that have now become known as CISCs to distinguish them from RISCs). This notion is both misleading and dangerous, because it implies that RISC processors are in some way cruder versions of previous architectures. In brief, RISC architectures redeploys to better effect much of the silicon real estate used to implement complex instructions and elaborate addressing modes in conventional microprocessors of the 68K and 8086 generation. We shall discover that, as several writers have proposed, the term RISC should really stand for regular, or even rationalized, instruction set computer.
If we consider the historical progression of microcomputer architectures as they
went from 8-
The first investigations into computer architectures that later became known as RISC
processors did not originate in the microprocessor industry. John Cocke at IBM is
usually given credit for the concept of the RISC computer. In 1974 IBM was involved
in a project to design a complex telephone-
If the RISC philosophy is so appealing, why was it not developed much earlier? The
short answer to this question is that RISC architectures make sense only in a 32-
Instruction Usage
A number of computer scientists working independently over a decade or more in the 1970s carried out extensive research into the way in which computers execute programs. Their studies all demonstrate that the relative frequency with which different classes of instructions are executed is not uniform and that some types of instruction are executed far more often than others.
Counting instruction usage is not as simple as you might think. Two metrics of instruction
usage can be employed: static and dynamic. In the former, static instruction frequency,
the occurrence of each instruction type in a block of code is measured, whereas in
the latter, dynamic instruction frequency, the occurrence of each instruction is
counted while the program is running. That is, one metric measures compile-
void main(void)
{
char X[10], Y[10];
int N = 10;
char s = 0;
int i = 0;
for (i = 0; i < N; i++)
s = s + X[i] * Y[i];
}
The output from a non-
* Variable X is at -
* Variable Y is at -
* Variable N is at -
* Variable s is at -
* Variable i is at -
_main
LINK A6,#-
*2 {
*3 char X[10], Y[10];
*4 int N = 10;
MOVE #10,-
*5 char s = 0;
CLR.B -
*6 int i = 0;
CLR -
*7 for (i = 0; i < N; i++)
BRA L1
L2
*8 s = s + X[i] * Y[i];
MOVE.B -
MOVE -
CLR.L D7
MOVE.B -
CLR.L D6
MOVE.B -
MULS D6,D7
ADD.B D7,D1
MOVE.B D1,-
*(see line 7)
ADD #1,-
L1 MOVE -
CMP -
BLT L2
*9 }
UNLK A6
RTS
As we are discussing instruction usage, you might be interested in seeing the same
fragment of code when it’s been hand-
Assembly language form Register transfer language form
CLR.L D0 [D0] 0 {Use D0 as S}
MOVE #X,A1 [A1] X {A1 points to X}
MOVE #Y,A2 [A2] Y {A2 points to Y}
REPEAT
LOOP MOVE.B (A1),D1 [D1] [M([A1])] {get xi}
MOVE.B (A2),D2 [D2] [M([A2])] {get yi}
MULS D2,D1 [D1] [M([A2])].[D1] {xi x yi}
ADD.B D1,D0 [D0] [D0] + [D1] {S:= S + xi x yi}
ADD #1,A1 [A1] [A1] + 1 {inc X pointer}
ADD #1,A2 [A2] [A2] + 1 {inc Y pointer}
CMP #X+N,A1 [A1] -
BNE LOOP UNTIL all N elements added
The static instruction frequency is determined easily by adding up all instances
of each type of instruction in the source code. In order to evaluate the dynamic
instruction usage, we must either manually walk through the program counting instructions
as they are used, or we must run the program on some system that automatically measures
instruction frequency. In the example of the hand-
There has been considerable debate over whether static and dynamic instruction frequencies are correlated. It is tempting to maintain that “If instruction types are uniformly distributed throughout a sufficiently large program, it does not matter whether they are executed inside or outside a loop.” In other words, some believe that in an infinitely large program the ratio of instruction A to instruction B is the same for both static and dynamic instruction counts. Although measurements of static and dynamic instruction frequencies do not yield identical results, there is sufficient correlation between these measurements to regard either of them as a good pointer to instruction usage.
You can divide instructions into groups in several ways; for example, some include
arithmetic and logical operations in the same group and some don’t. However, everyone
agrees on certain basic principles such as data movement instructions make up a unique
group . The following instruction groups have been compiled by Fairclough, who divided
machine-
- Data movement
- Program modification (i.e., branch, call, return)
- Arithmetic
- Compare
- Logical
- Shift
- Bit manipulation
- Input/output and miscellaneous
We could debate the validity of these groupings today. However, what we are attempting
to do here is to demonstrate the extreme variation in relative instruction frequency
between different groups. Fairclough compiled tables of static instruction frequency
for seven machines: 6502, 6800, 9900, 68000, NOVA 1210, IBM 360/370 and the Litton
computer. Although these are no longer state-
Table 1 provides Fairclough’s results and figure 1 illustrates them in histogram form. The data was compiled by analyzing randomly selected programs of many differing types (including assemblers, interpreters, compilers, monitors, kernels, operating system libraries).
Table 1 Relative instruction frequency expressed as a percent
Instruction group
Machine 1 2 3 4 5 6 7 8
6502 40.72 26.24 11.49 3.84 5.85 7.04 3.92 0.90
6800 59.52 26.54 4.35 3.68 4.15 1.33 0.43 0.00
9900 36.71 37.24 10.64 6.77 2.36 2.15 4.09 0.04
68000 43.52 25.13 12.09 9.15 5.03 2.65 2.36 0.07
NOVA 1210 37.74 26.53 14.28 10.15 6.08 2.32 1.44 1.46
IBM 360/370 61.48 16.30 13.14 3.80 1.70 3.58 0.00 0.00
Litton 37.24 43.16 9.23 4.05 2.20 1.41 2.12 0.59
Mean value 45.28 28.73 10.75 5.92 3.91 2.93 2.05 0.44
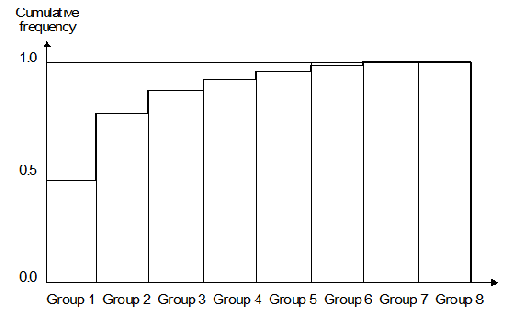
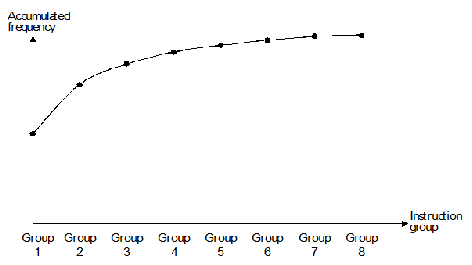
Fairclough fitted a curve, figure 2, to the data in table 1 to obtain the approximate
function f(n) = 2-
Figure 1 Histogram of relative instruction frequency for seven processors
The data in figure 1 and table 1 convincingly demonstrates that the most common instruction
type is the assignment or data movement primitive of the form P = Q in a high-
Figure 2 Cumulative relative instruction frequency
An inescapable inference from such results is that processor designers would be better employed devoting their time to optimizing the way in which machines handle instructions in groups one and two, than in seeking new powerful instructions that look impressive in the sales literature. In the early days of the microprocessor, chip manufacturers went out of their way to provide special instructions that were unique to their products. These instructions were then heavily promoted by the company’s sales force. Today, we can see that their efforts should have been directed towards the goal of optimizing the most frequently used instructions (as do today’s chip designers). RISC architectures have been designed to exploit the programming environment indicated by tables 1 and 2. Table 2 provides a summary of the results of various researchers for the relative frequencies (both static and dynamic) of instruction usage. In this table, instruction groups 3 to 7 have been combined into a single column. These figures are even more dramatic than those obtained by Fairclough.
Table 2 A summary of other work on the relative frequency of instruction usage
Authority Measurement Type Instruction usage by percent
Group 1 Group 2 Groups 3 -
[AlexWort75] static 48 49 3
[Lunde77] static 47 52 1
[Lunde77] dynamic 42 56 2
[PatSeq82] dynamic 42 54 4
Operand Encoding
It is reasonably true to say that the manufacturers of eight-
By means of careful operand encoding, CISC designers often include frequently used
operands as part of the instruction format. For example, a machine-
An obvious question to ask is, “What is the range of the majority of literal operands?”
In 1987 Tanenbaum reported that 56% of all constant values lie in the range -
The importance of data movement primitives and an ability to handle efficiently short literals should be recognized by any designer attempting to implement an optimum architecture. Before we can consider the design of architectures that address themselves to these issues, we still have to consider the nature of operands. It would be very difficult to optimize a data movement primitive if operands were randomly distributed throughout logical address space, because each instruction would have to include an address field spanning all the processor’s address space. We know intuitively that operands are not randomly distributed since the whole basis of cache memory systems relies on the locality of reference.
Measurements made by Tanenbaum, and by Halbert & Kessler indicated that for over
95% of dynamically called procedures just twelve words of storage are sufficient
for all their arguments and local values. That is, if an architecture has twelve
words of on-
Characteristics of RISC Architectures
We can summarize the previous discussion and lay down a list of the desired characteristics of an efficient RISC architecture.
- A RISC processor should have sufficient on-
chip memory (i.e., registers) to help overcome the worst effects of the processor- memory bottleneck. Internal memory on the CPU chip can be accessed more rapidly than off- chip random access main store. We have stated that procedures require on average less than twelve words for local storage and parameter passing. This fact indicates that it is indeed feasible to adopt on- chip storage.
- Since instructions in the program modification group that includes procedure call and return instructions are so frequently executed, an effective architecture should make provision for the efficient passing of parameters between procedures.
- A RISC processor should execute approximately one instruction per clock cycle. CISC architectures sometimes require tens of clock cycles to execute an instruction. Attempting to approach one clock cycle per instruction imposes a limit on the maximum complexity of instructions.
- RISC architectures should not attempt to implement infrequently used instructions. Complex instructions both waste silicon real estate and conflict with the requirements of point 3 above. Moreover, the inclusion of complex instructions increases the time taken to design, fabricate and test a processor.
- A corollary of point 3 is that an efficient architecture should not be microprogrammed, as microprogramming interprets an instruction by executing microinstructions. In the limit, a RISC processor itself is close to a microprogrammed architecture in which the distinction between machine cycle and microcycle has vanished.
- An efficient processor should have a single instruction format (or at least very few formats). By providing a single instruction format, the decoding of an instruction into its component fields can be performed with a minimum level of decoding logic.
- In order to reduce the time taken to execute an instruction, the multilength instructions
associated with first-
and second- generation microprocessors should be abandoned. As it would be unreasonable to perform multiple accesses to the program store to read each instruction, it follows that the wordlength of a RISC processor should be sufficient to accommodate the operation code field and one or more operand fields. A corollary of this statement is that a high- speed RISC processor may not necessarily be as efficient as a conventional microprocessor in its utilization of program memory space.
We now look at the three fundamental aspects of the early RISC architectures. First,
we describe how it has a large number of on-
Register-
Both machine-
Instruction type Assembly language form RTL form
One operand CLR X [X] 0
Two operands ADD X,Y [Y] [X] + [Y]
Three operands ADD X,Y,Z [Z] [X] + [Y]
Four operands ADD W,X,Y,Z [Z] [W] + [X] + [Y]
Five operands ADD V,W,X,Y,Z [Z] [W] + [X] + [Y] + [Z]
If complexity is no object, there is clearly no limit to the number of fields that might be assigned to an instruction. Research by Tanenbaum indicates the following frequency of operand sizes:
Single operand: 66%
Double operand: 20%
Three or more operands: 14%
Before we look at the Berkeley RISC’s use of registers, it is instructive to consider
a new metric for programs: size. A program contains two components: instructions
and data. We can therefore construct a metric that is the sum of a program’s instruction
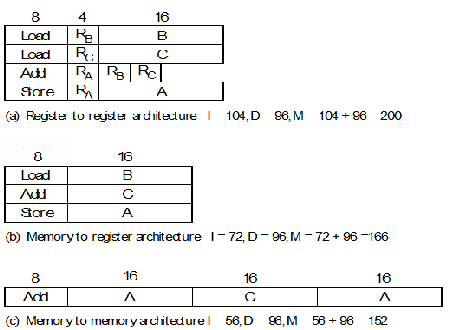
bits plus its data bits. Figure 3, taken from Patterson illustrates how we can calculate
the number of bits required to implement the operation A = B + C for three different
architectures. In this example we assume that the data words are 32 bits, the address
field is 16 bits and the register select field is 4-
Architecture Instruction bits Data bits Total bits
Register to register 104 96 200
Memory to register 72 96 168
Memory to memory 56 96 152
These figures appear to indicate that a memory-
Figure 3 Memory requirement as a function of computer architecture (after Patterson)
Now we will discuss the Berkeley RISC I and RISC II architectures. These devices were developed by David Patterson and his colleagues at the university of California in the early 1980s. Although RISC I and RISC II are academic machines constructed to test RISC concepts, they proved to be the prototypes for many later commercial RISC machines. I have called them prototypes because they were to have a greater impact on the computer industry than the IBM 801 project.
The Berkeley RISC I architecture adopts the three-
Figure 4 Op-
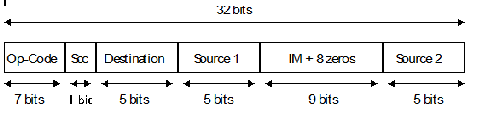
The RISC I instruction format supports dyadic instructions of the form ADD X,Y,Z,
where X, Y and Z are internal registers. Since five bits are allocated to each operand
field, it follows that the RISC I must have 32 user-
An important concept of early RISC processors was the register window, a means of increasing the apparent number of registers. We give this topic its own page.